| Ch Mechanism Toolkit Demos | |
|
Example 2 --
Design a cam-follower system.
Description of the cam-follower system:
Design a cam-follower system with
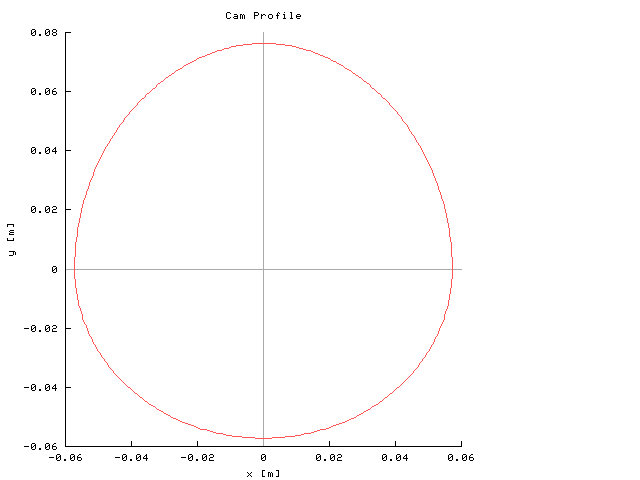
the translating flat-face follower. The cam should have
a base radius of 5.72 cm,
no follower offset.
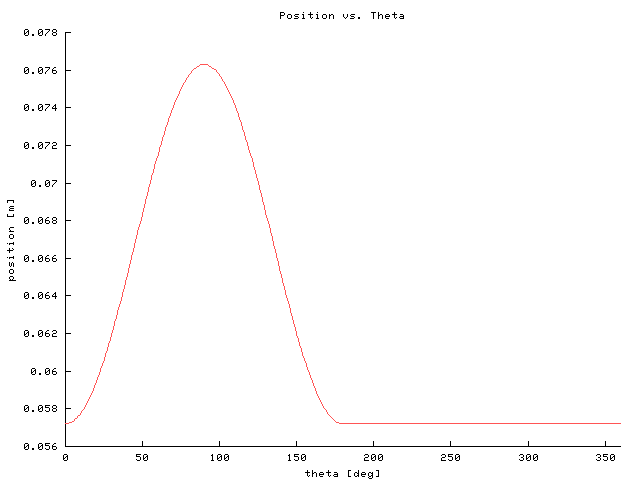
During the first 90 degrees of cam rotation, the follower
should move outward 1.91 cm with harmonic motion. During the next
90 degrees,
the follower should move inward 1.91 cm with harmonic
motion. For the remainder of the cam rotation the follower should not
change position.
Output to be obtained:
Generate plots with 360 points for the cam profile,
transmission angle, and follower position.
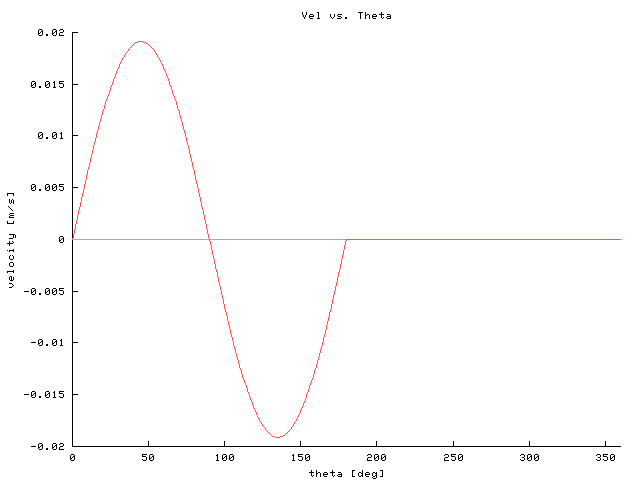
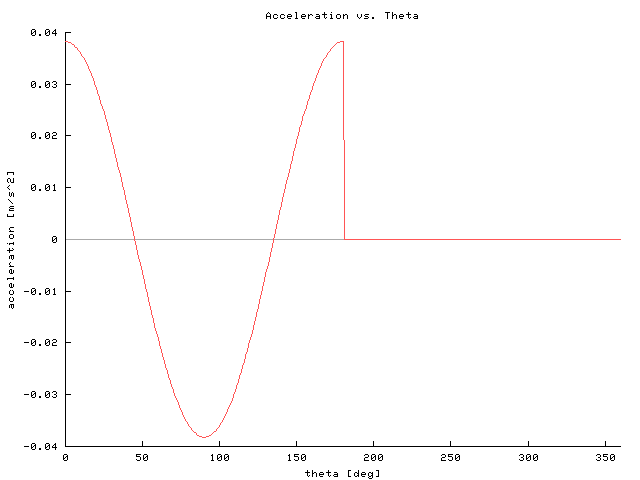
When the cam rotates at the angular velocity of 1 rad/s,
generate plots
for the follower velocity and acceleration.
Also generate an animation of the
cam-follower system using 12 positions.
Program using CCam class in Ch Mechanism Toolkit:
Output from the above program:
|
|